Forse è giusto che io vi dia la mia prima
Allora secondo me
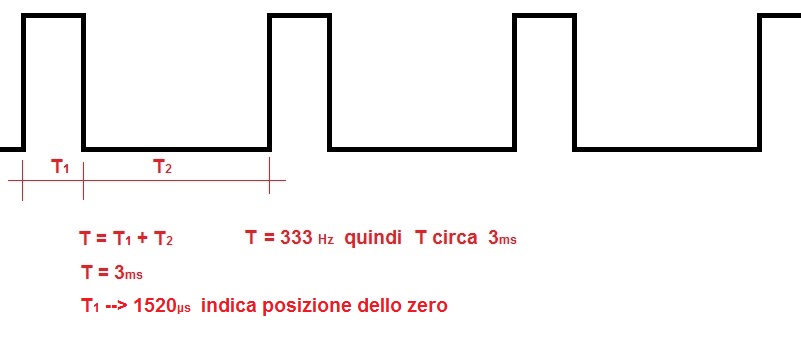
i 333Hz o se vogliamo i 3ms indicano il tempo minimo necessario al servo per accettare il segnale sucessivo
i 1520μs indicano il valore della durata dell'impulso quando si viole raggiungere la posizione centrale (lo zero servo se vogliamo)
mi chiedo però se ad un servo comandato da pollici umani quella frequenza di 333Hz abbia un senso, ovvio potrebbe averla se il segnale di posizionamento fosse inviato da un giroscopio o da altri sistemi di controllo elettronico.
Però mi piace che su molti servi si inizi ad indicare anche questo dato
piccolo grafico